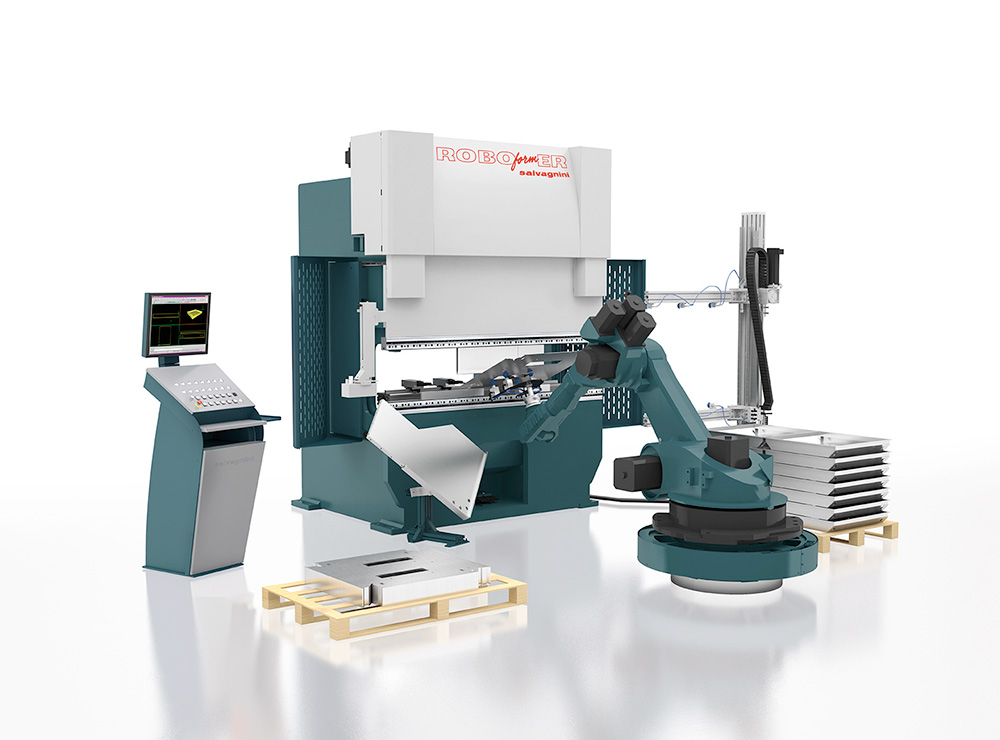
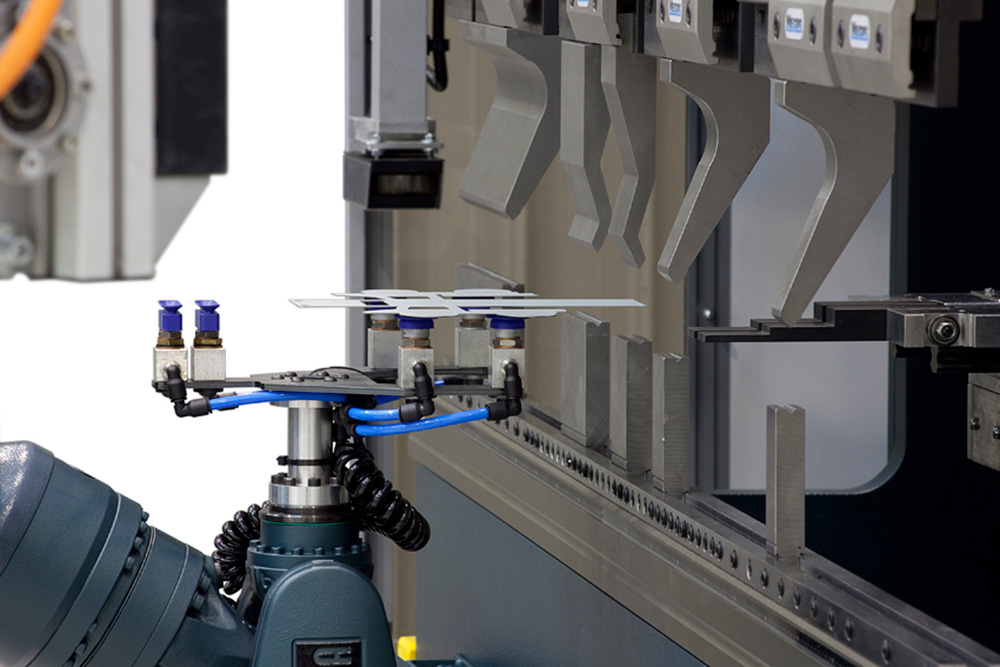
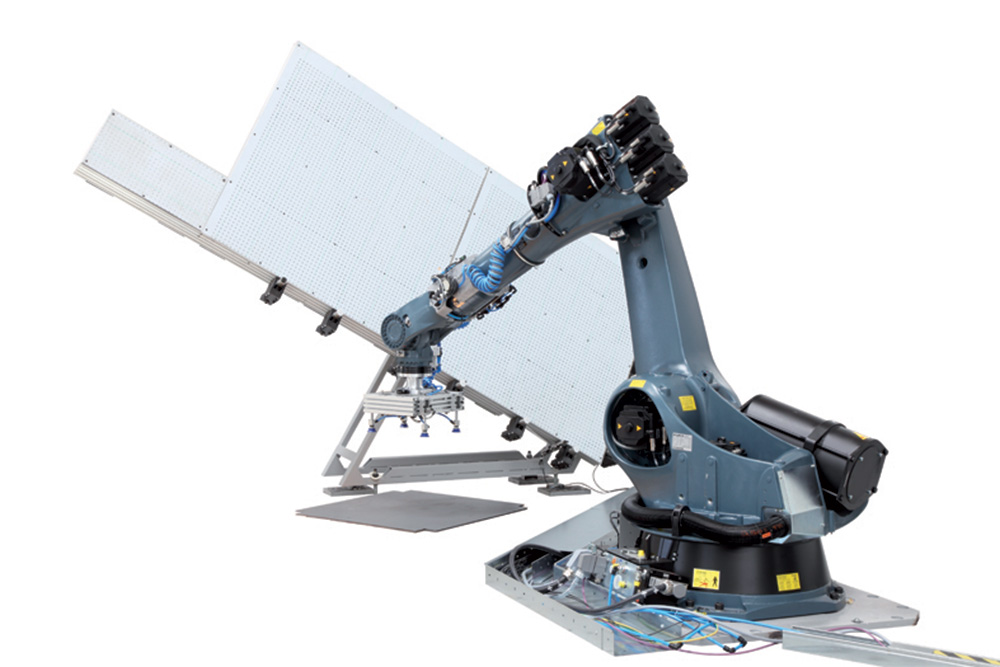
Роботизированные гибочные ячейки KR240L180









Отправить заявку
Мы пришлем вам коммерческое предложение
Технические характеристики

Отправить заявку
Мы пришлем вам коммерческое предложение